

资料获取:电机控制资料获取
有关PID控制的基础部分,详情见PID控制算法
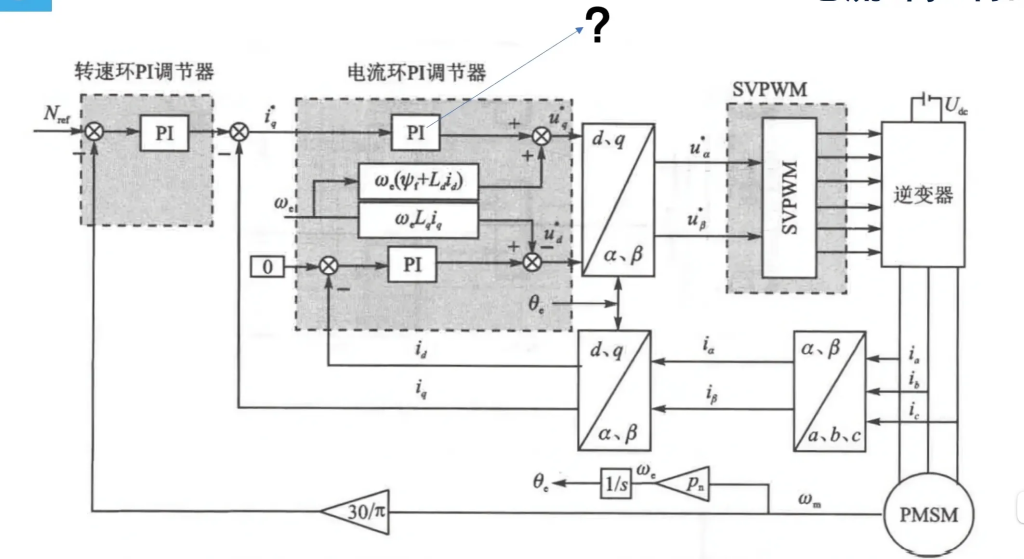
电流环控制器
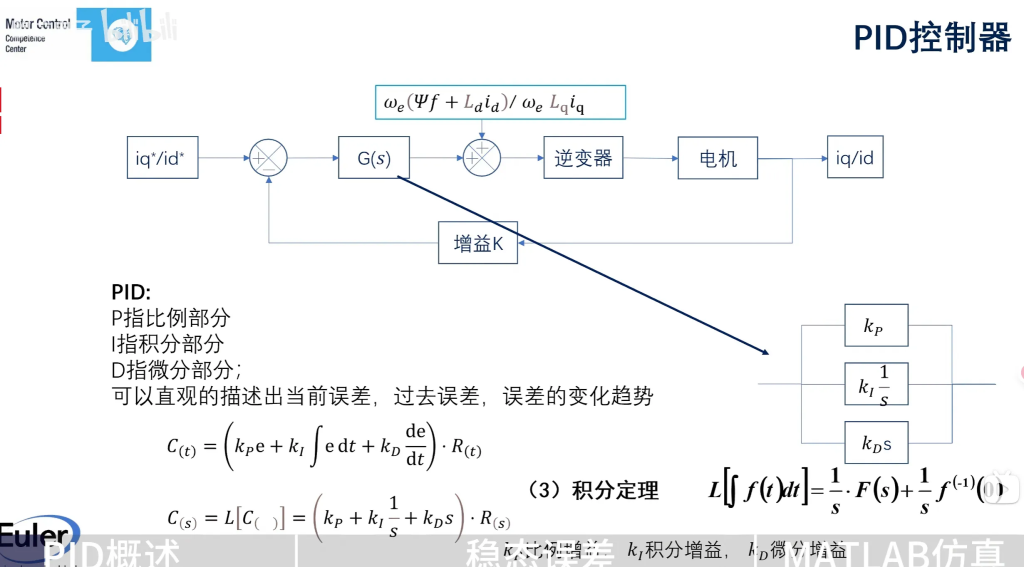
这是通常情况下的PID公式:$C(t) = \left( k_P e + k_I \int e \, dt + k_D \frac{de}{dt} \right) \cdot R(t)$
对它做拉普拉斯变换(用到了积分定理):$C(s) = L\left[ C(t ) \right] = \left( k_P + k_I \frac{1}{s} + k_D s \right) \cdot R(s)$
P控制器
传递函数推导
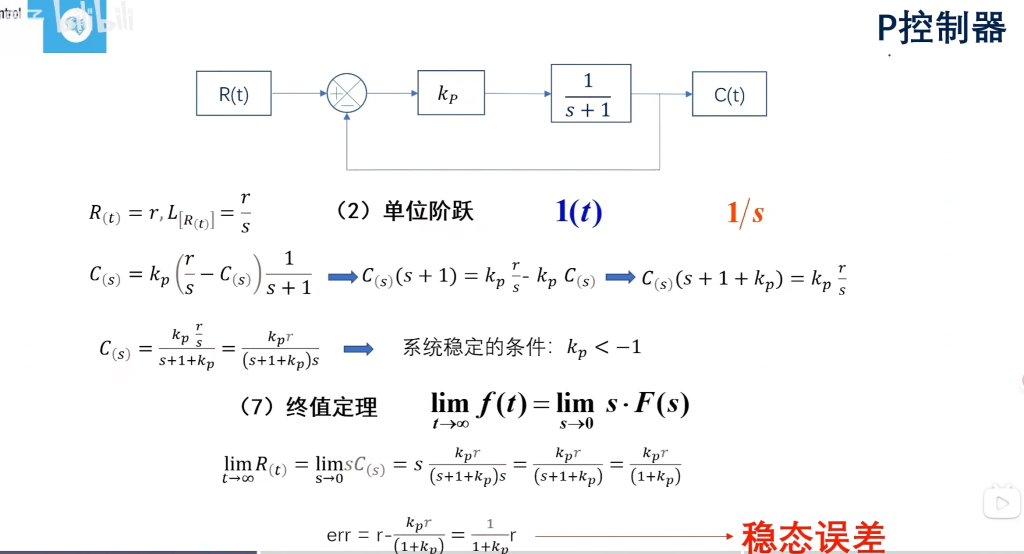
通常情况下,我们总是希望控制系统保持一个不变的输出值,也就是说R(t)是一个常数r;
在只有P项的情况下,PID公式为$C(t)=k_Pe$,它在拉普拉斯变换后为:$C(s) = k_P e$,其中$e=R(t)-C(t-1)$,即期望与上一次PID输出之差;
我们假设被控对象传递函数为$G(s)=\frac{1}{s+1}$;
那么整个系统的开环传递函数为:
$ \begin{align} G_{open}(s)&=C(s) \cdot G(s)\\ &=\frac{k_p\frac{r}{s}-k_pC(s)}{s+1}\\ &=\frac{k_pr}{(s+1+k_p)s} \end{align}$
开环传递函数推导:
- PID 控制器传递函数 $G_{pid}(s)=k_p + k_i\frac{1}{s}+k_d s$是根据 PID 控制规律 $u(t)=k_p e(t)+k_i\int e(t)dt + k_d\frac{de(t)}{dt}$进行拉普拉斯变换(假设 e(0)=0 等初始条件为零)得到的,其中 u(t) 是控制器输出,e(t)是误差信号。
- 被控对象传递函数 $G(s)=\frac{1}{s + 1}$描述了被控对象在拉普拉斯域的输入输出关系。开环传递函数表示控制器输出直接作用于被控对象时的传递关系,所以将两者相乘。
- 对乘积 $\left(k_p + k_i\frac{1}{s}+k_d s\right)\times\frac{1}{s + 1}$ 进行通分展开,就得到了$\frac{k_p}{s + 1}+\frac{k_i}{s(s + 1)}+\frac{k_d s}{s + 1}$。
求极点得$\begin{cases}s=0\\ s=-k_p-1\end{cases}$,要想让系统达到稳态s必须处于负半轴,解得$k_p>-1$(所以图中说小于-1标错了)
稳态误差
根据拉普拉斯终值定理:$\lim_{t \to \infty} f(t) = \lim_{s \to 0} s \cdot F(s)$ ,
所以:
$\begin{align} \lim_{t \to \infty} R_{(t)} = \lim_{s \to 0} s C_{(s)} &= s \frac{k_p r}{(s + 1 + k_p)s}\\ &= \frac{k_p r}{(s + 1 + k_p)}\\ &= \frac{k_p r}{(1 + k_p)}\end{align}$
即当时间趋于无穷时,最终系统达到稳态,此时输出值为$\frac{k_p r}{(1 + k_p)}$。
所以$err=r-\frac{k_p r}{(1 + k_p)}=\frac{1}{1+k_p}r$就是整个系统的稳态误差。
仿照上述过程,试着推导一下,当被控对象满足什么条件时,系统不会有稳态误差?
PI控制器
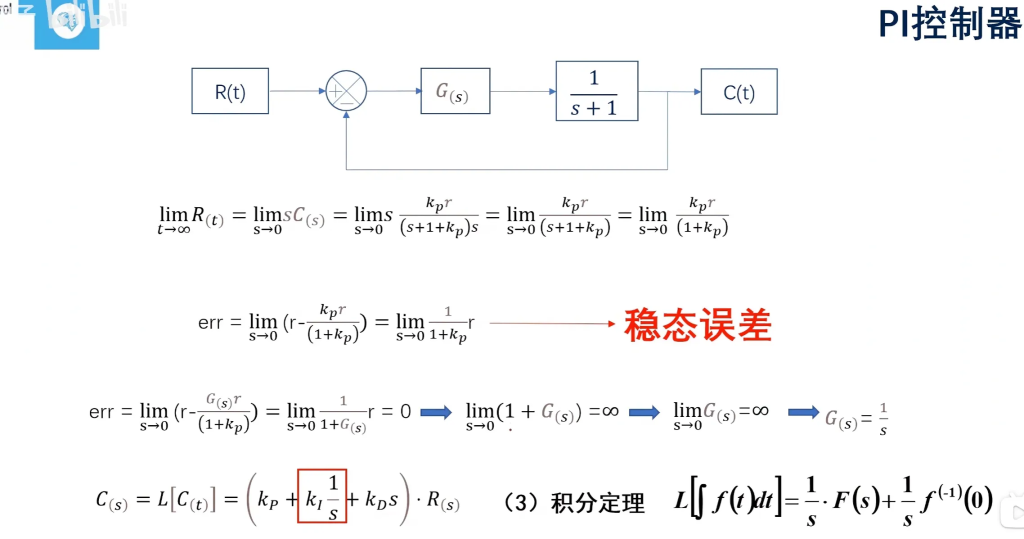
添加I项以后,PID在拉普拉斯域的表达式为:$C(s) = \left( k_P + k_I \frac{1}{s} \right) \cdot R(s)$。
我们先接着上面P项的结论来继续探讨:目前我们的控制系统有个稳态误差,但是我们不希望出现这个稳态误差,说明当前的控制系统无法满足我们的需要。
于是我们先假定一个新的控制系统,它的传递函数是G2(s),和我们的P控制器共同控制系统。
所以这个新的系统的传递函数为:$G_{system}(s)=G_2(s) \cdot C_{P}(s) \cdot G(s)$;
其中Cp(s)是P控制器传递函数,G(s)是我们假设的被控对象的传递函数。
在这种情况下,想让err=0,即:
$err = \lim_{s \to 0} \left(r – \frac{G_2(s)r}{(1 + k_p)}\right) = \lim_{s \to 0} \frac{1}{1 + G_2(s)} r = 0$
解得$G_2(s)=\frac{1}{s}$满足要求(满足$\lim_{s \to 0} G_2(s)= 0$的函数有很多,但是根据简洁的原则,1/s是最容易想到的一个解)。
而根据积分定理我们便可以逆变换出I项了。
PID控制器
高频噪声
虽然PI控制器已经可以将系统的稳态误差消除了,已经初步满足我们的要求了,但是引入I项会使系统达到稳定的时间延长,并伴随着超调的风险;这时候是不是可以靠引入D项来解决呢?
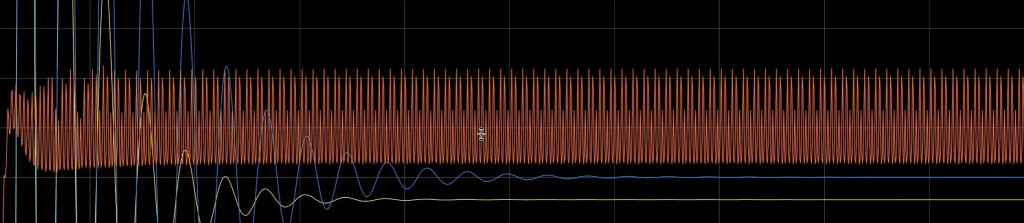
但我们可以看到,加入D项后,整个系统的波形变得像是混合了某种噪声一样。
事实上,这种噪声来自于整个环境,即便是幅值非常小的噪声,如果频率很高的话,对PID控制器的影响将是灾难性的(P和PI要好一点,但即便如此也会使其期望值翻了10倍)
为什么不用PID控制器
固然,来自环境的高频噪声可以用低通滤波器来解决:
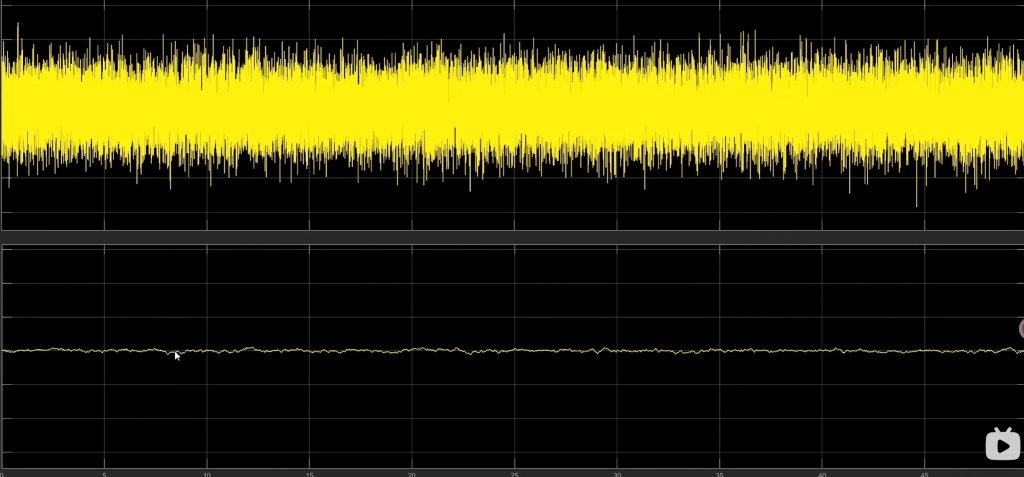
但这样会使我们本就不富裕的MCU算力雪上加霜;所以通常情况下使用PI控制器来控制电流环已经足够了。
电流环PI参数计算
电流环闭环传递函数
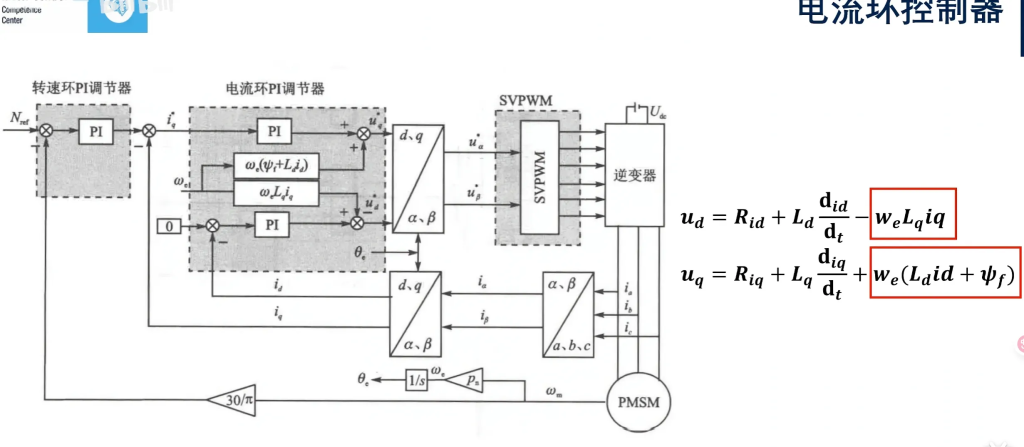
电机数学模型(dq轴):$\begin{cases} u_d = R i_d + L_d \frac{\mathrm{d} i_{id}}{\mathrm{d} t} – \boldsymbol{w_e L_q iq} \\ u_q = R i_{iq} + L_q \frac{\mathrm{d} i_{iq}}{\mathrm{d} t} + \boldsymbol{w_e (L_d id + \psi_f)} \end{cases}$
前面我们说过,想要做拉普拉斯变换,必须得是一个线性定常的系统才行。但是不论d轴还是q轴,其表达式末尾都有一个常数项,这就不满足“线性”的要求了。
于是我们在调控时,先忽略这一部分,在PI控制器调控完后再当作前馈加上去(就像框图里做的那样)。
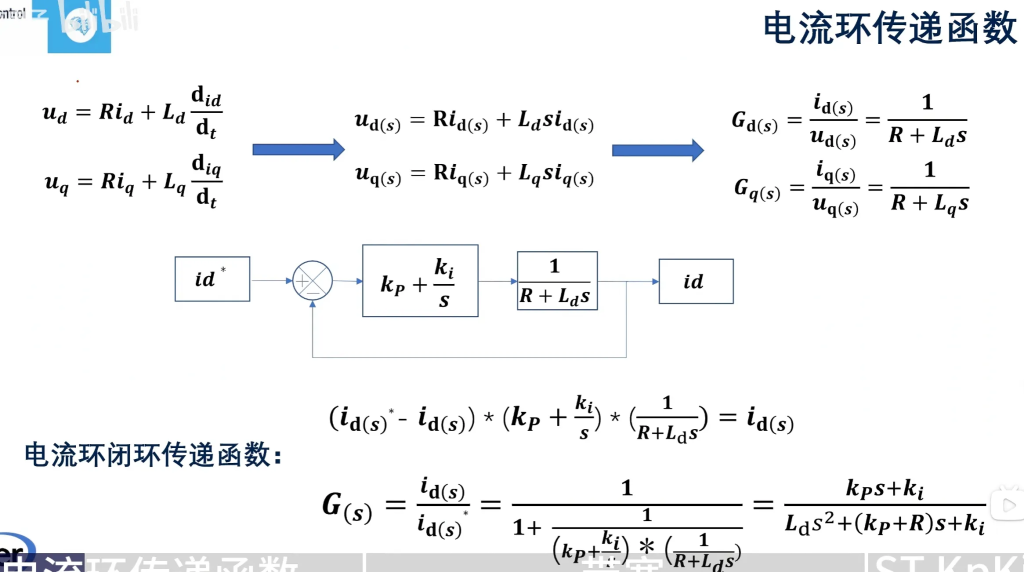
此时将dq轴做拉普拉斯变换:$\begin{cases} u_{d}(s)=R i_{d}(s)+L_d s i_{d}(s)\\ u_{q}(s)=R i_{q}(s)+L_q s i_{q}(s) \end{cases}$
可得传递函数:
$\begin{cases}\Large G_{d}(s)=\frac{i_{d}(s)}{u_{d}(s)}=\frac{1}{R + L_d s}\\ \Large G_{q}(s)=\frac{i_{q}(s)}{u_{q}(s)}=\frac{1}{R + L_q s} \end{cases}$
然后看图片中间部分,这是我们调控id时的框图,系统输入期望值id*,输出调控值id;
有:$\left( i_{d}(s)^{*}-i_{d}(s) \right)\left( k_P+\frac{k_i}{s} \right)\left( \frac{1}{R + L_d s} \right)=i_{d}(s)$
整理可得:$G(s)=\frac{i_{d}(s)}{i_{d}(s)^{*}}=\frac{1}{1+\frac{1}{\left( k_P+\frac{k_i}{s} \right)\left( \frac{1}{R + L_d s} \right)}}=\frac{k_P s + k_i}{L_d s^2+(k_P + R)s + k_i}$
我们发现分母有个二阶的s,这肯定是不利于我们求解的,于是还要进一步处理;除了求根公式和因式分解以外,我们还有一种方法:
通过带宽计算参数
令:$\begin{cases}k_p=L_d\omega_c\\ k_i=R\omega_c \end{cases}$,其中ωc为电流环带宽。
什么是电流环带宽?
电流环带宽是指电流环的闭环系统频率响应中,幅值衰减到低频(通常取 ω=0 时的幅值作为参考)幅值的 $\frac{1}{\sqrt{2}}$(约 0.707 倍)时所对应的频率 ωb。也就是说,当输入信号频率低于 ωb 时,电流环能够较好地跟踪输入信号(幅值衰减较小,相位滞后也较小);而当输入信号频率高于 ωb 时,电流环对输入信号的跟踪能力显著下降。
带宽并不是越大越好:带宽越大,受到环境噪声的干扰就越多。
如何计算带宽?
- 假设电流环的闭环传递函数为 $G_{closed}(s)$(通过对电流环的控制器(如PI控制器)、被控对象(如电机的电枢回路等)进行拉普拉斯变换和闭环系统分析得到)。
- 令 $s = j\omega$(j 是虚数单位),代入 $G_{closed}(s)$ 得到频率响应 $G_{closed}(j\omega)$。
- 计算 $|G_{closed}(j\omega)|$(幅值响应),当 $|G_{closed}(j\omega)|=\frac{|G_{closed}(j0)|}{\sqrt{2}}$ 时,对应的 ω 就是电流环带宽 ωb。例如,若电流环闭环传递函数 $G_{closed}(s)=\frac{k_{PS}+k_i}{L_d s^2+(k_P + R)s + k_i}$(类似于一些简单电机电流环模型的传递函数形式,其中 kP、ki 是PI控制器参数,Ld 是电感,R 是电阻),将 s=jω 代入后,通过计算幅值并找到满足上述幅值条件的 ω 值,即可确定带宽。
- 第二种方法:令τ=min{Ld/R,Lq/R},ωc=2Π/τ;
所以:
$\begin{align} G_{(s)}=\frac{i_{d(s)}}{i_{d(s)}^{*}}&=\frac{k_{P}s + k_{i}}{L_{d}s^{2}+(k_{P}+R)s + k_{i}}\\ &=\frac{L_{d}\omega_{c}s+R\omega_{c}}{L_{d}s^{2}+(L_{d}\omega_{c}+R)s + R\omega_{c}}\\ &=\frac{\omega_{c}}{s+\omega_{c}} \end{align}$
- 其中最后一步需要的分母因式分解得到。
依据 $\begin{cases}τ=\min(\frac{L_d}{R},\frac{L_q}{R})\\ ω_c=\frac{2\pi}{\tau}\end{cases}$ 计算出ωc,并代入 $\begin{cases}k_p=L_d\omega_c\\ k_i=R\omega_c \end{cases}$ 即可算出Kp、Ki的值。
同理,q轴公式为$\begin{cases}k_p=L_q\omega_c\\ k_i=R\omega_c \end{cases}$ 。
速度环控制器
一般来说速度环控制器的带宽时电流环的5~10分之一。但是还千万别以此为依据去否定其它的参数,比如我在实际建模后发现1/20才是最优解。
计算公式:
$\begin{cases}k_{p\omega}=\frac{\beta J}{1.5p_n\phi_f}\\k_{iw}=\beta k_{pw}\end{cases}$
,其中β为速度环带宽,Pn为电机极对数,Φf为磁通量,J为电机转动惯量。
发表回复