

资料获取:电机控制资料获取
SPWM和SVPWM介绍
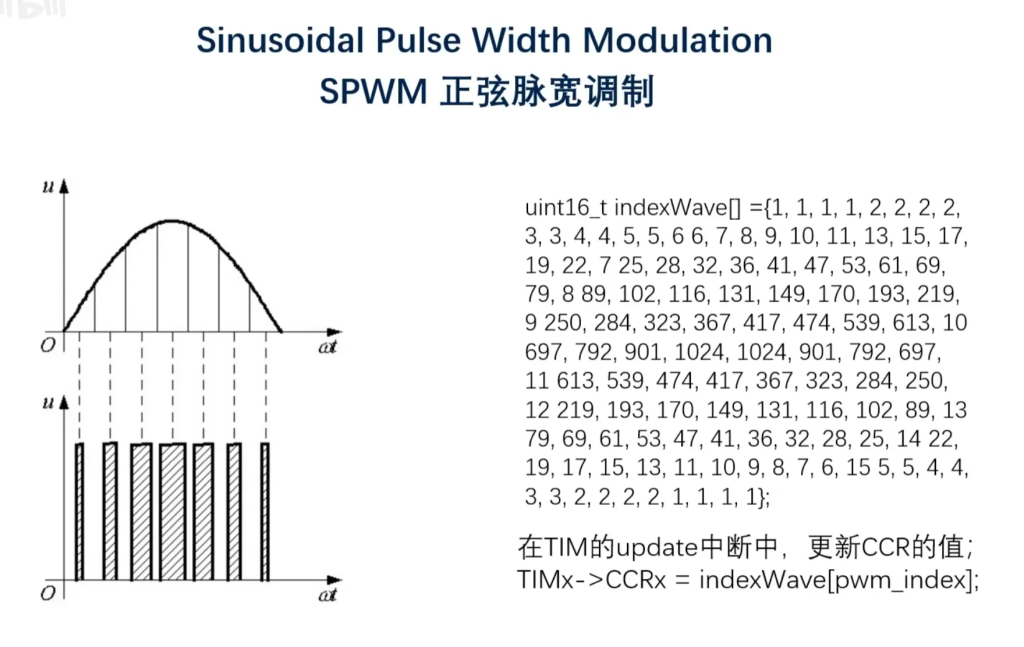
做过呼吸灯的应该都很清楚这个过程吧……
控制逻辑
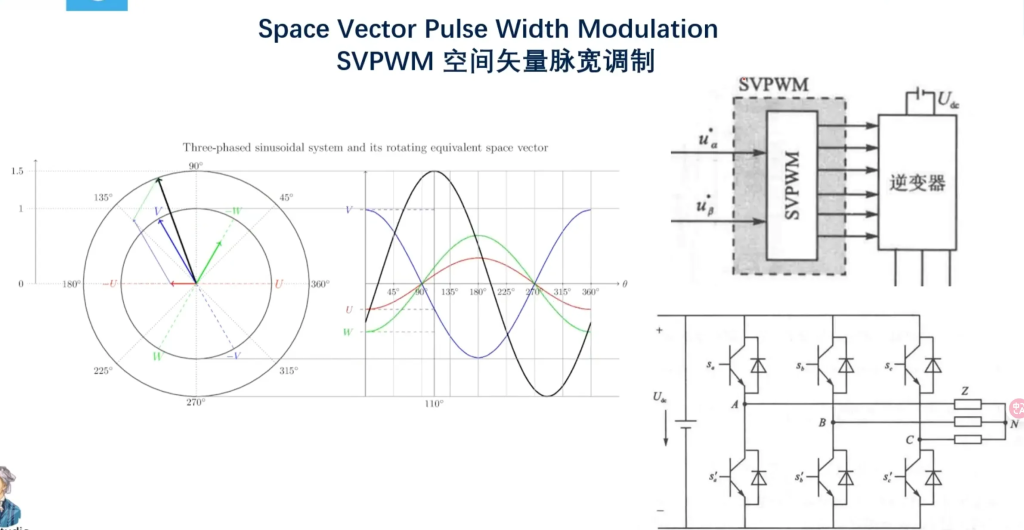
由于我们通常使$U_d$保持为0,所以我们需要的参数只有$U_q$(所需力矩电压)和$\theta$(电机当前角度);将这些参数用反帕克变换和反克拉克变换后成为$U_a U_b U_c$,再由逆变器输出相应电压控制电机旋转。
- 其实真正的算法应该接收Uα和Uβ作为参数。
最后:$\vec {U_{out}} = \vec {U_a}+\vec {U_b}+\vec {U_c}$
矢量合成
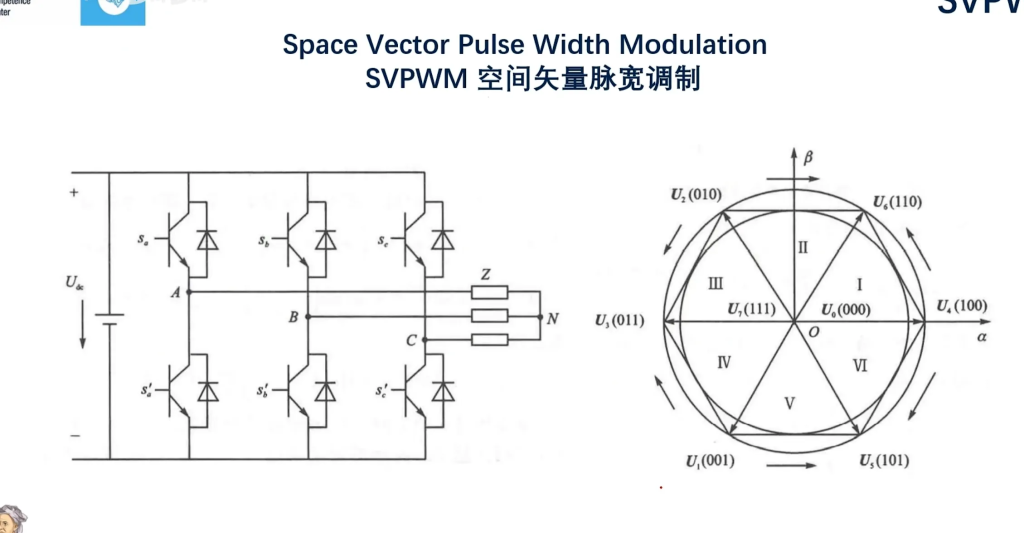
如图,只要我们像正弦脉宽调制那样调制各个mos管,就可以输出我们想要的电压,进而产生对应的力矩了。
这个过程简单解释就是我们已经知道了ABC对应三个方向的向量,通过SPWM分别调整这三个向量的模长,就可以矢量合成出不同的方向向量了。
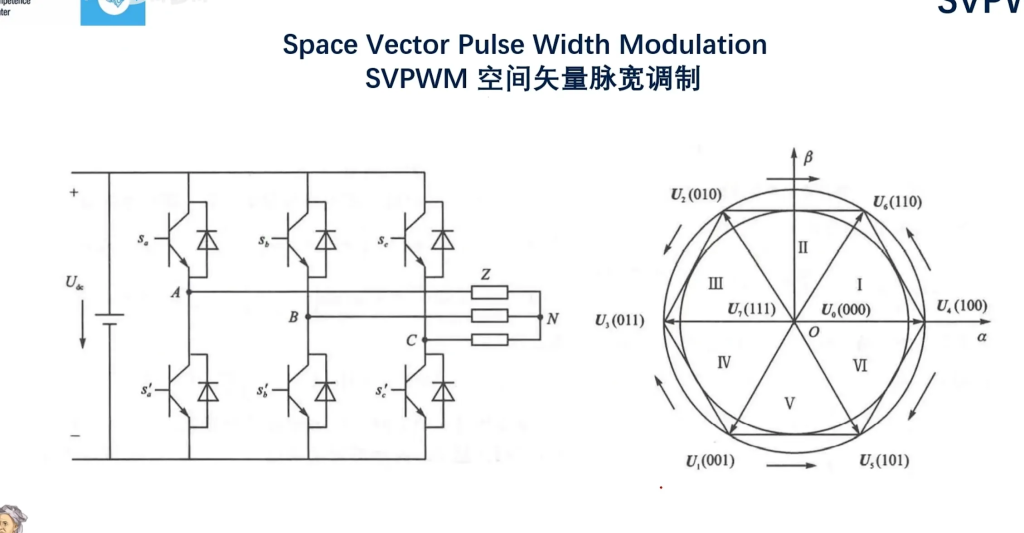
我们前面在第五讲:SVPWM引入的时候说过STM32只能输出正电压,这也是为什么我们有三个mos管而不是两个的原因(理论上两个不平行的向量足以表示该平面所有向量了,但由于没有负值,所以我们需要一个额外的方向相反的向量,就比如图中的U1就是U6的相反向量)
SVPWM算法原理
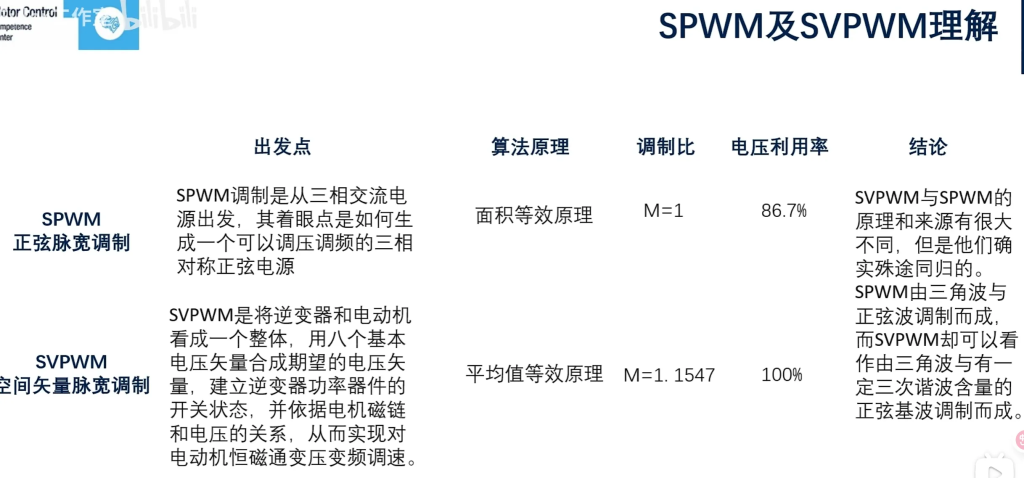
什么是调制比?
简单来说就是输出电压值与输入值之比。
SPWM的最高值就是输入值,所以它的M为1;
SVPWM的输出值因为可以由多个矢量合成,因此最高值会比输入值高,如下图的U。
AI解释调制
1概念:到底在“调制”谁?
- 逆变器最终想输出的是低频正弦电压(基波),但功率器件只能“开/关”。
- 解决思路:用高频开关信号(载波)去“搬运”一个低频目标波形(调制波)。
- 因此:
调制波 = 低频目标电压波形
载波 = 高频三角/锯齿波或定时比较器
调制动作 = 把目标波形“叠”到载波上 → 生成 PWM 脉冲
在这里调制就是指通过PWM输出呈正弦变化的电压。
个人理解
就已呼吸灯为例吧,在上一节我们说SPWM的时候,有一个图:
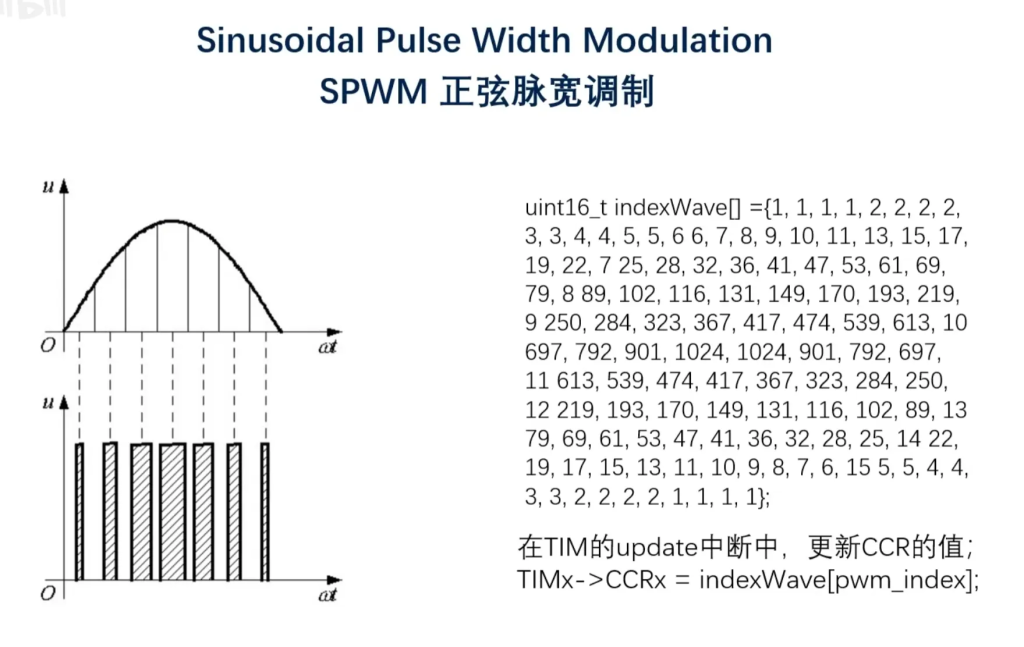
比如我们想让PWM占空比以正弦波的方式变换,从而使灯的亮度也按照正弦波的形式变换,于是我们就不断改变CCR的值,从而实现出图中下方所示的方波波形,这就是我们的调制波。
那么载波在哪里呢?在这之前,你还记得CCR是用来干什么的吗?是的,用来和计数器比较。那么计数器的值是一个三角波(通常情况下),这个三角波就是我们的载波频率了。(它又是来自于哪里呢?来自于定时器的工作时钟频率,也就是我们APB总线经过分频后的频率。虽然三角波是由于计数器以时钟频率计数产生的,但由于时钟频率并不直接参与调制,因此不能说是载波频率。)
2 数学形式:一条正弦,外加三次谐波
以三相系统为例,先给出最原始的“理想调制波”:
ua(t)ub(t)uc(t)=Umcos(ωt)=Umcos(ωt−120∘)=Umcos(ωt+120∘)
- Um 由所需输出电压决定
- ω=2πf,f 为期望输出频率(如 50 Hz)
但这样直接做 SPWM 时,最大基波幅值只能到 Vdc/2。为了榨干母线电压,工程上会给调制波注入三次谐波(或改用 SVPWM 等效实现),使波形变成“鞍形”——这就是你在 SVPWM 文献里看到的“调制波含有固定三次谐波含量”的来源。(SVPWM不是三次谐波注入!)
3 在硬件/软件里怎么产生这条“调制波”?
- 模拟实现
早期:用函数发生器或运放搭一个 50 Hz 正弦波 → 与三角波比较 → 输出 PWM。 - 数字实现(MCU/DSP)
- 查表法:预存 256 点或 512 点正弦表,按定时中断逐点输出。
- 实时计算:FOC/SVPWM 算法每个 PWM 周期实时计算下一拍的目标电压矢量,再反算出三相调制波瞬时值。
- 坐标变换:在 d-q 坐标系里运行 PI 调节器,得到 ud、uq,再经反 Park 变换回到三相调制波 ua,ub,uc。
一句话总结
调制波就是“用低频目标波形去指挥高频开关动作”的那条指令信号。
在电机控制里,它要么是一条纯正弦(SPWM),要么是经过空间矢量运算后的“鞍形”正弦(SVPWM);无论哪种形式,最终目的都是让逆变器“雕刻”出我们想要的正弦电压。
SVPWM算法原理
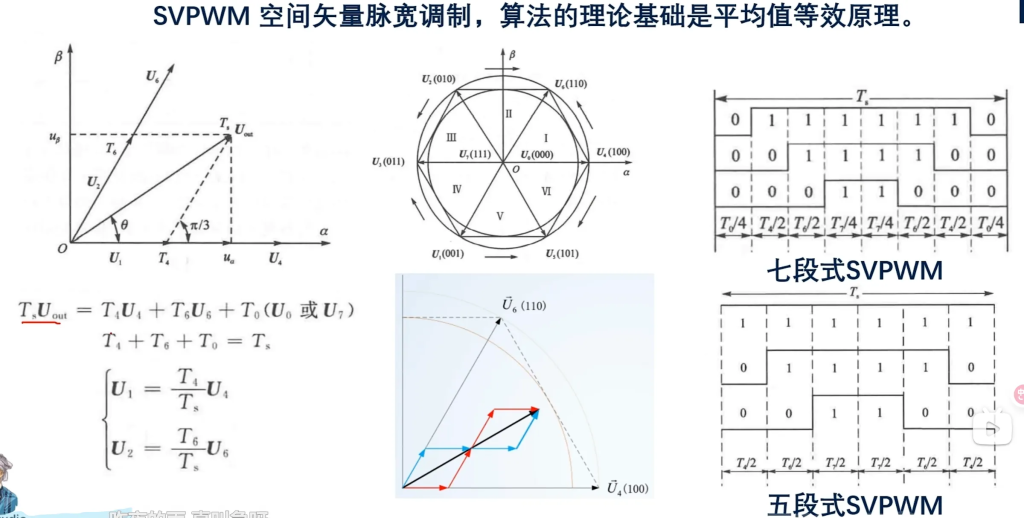
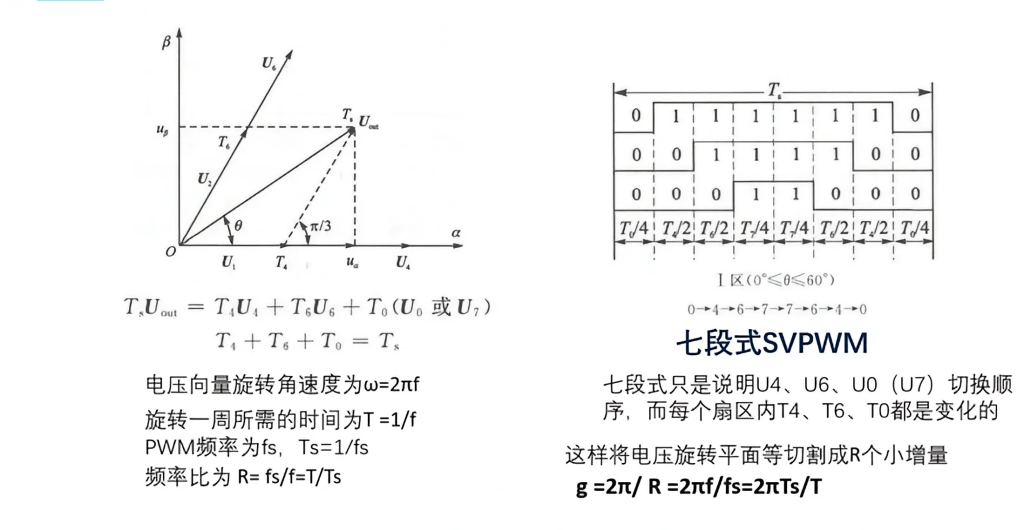
先看左边那部分,这部分说的是平均值等效原理。
$T_SU_{out} = T_4U_4 + T_6U_6 + T_0U_0(或U_7)$ ,
其中$T_s$是PWM周期,$T_s = T_4+T_6+T_0$;U4U6指中间上面的圆中不同方向的电压;而T0又是指“零序分量”:
零序分量(零区分量、共模分量)
这是什么*东西*?
在一个 PWM 周期内,为了让 两个有效矢量的时间之和 小于整个周期,而必须插入的那一段 零矢量(000 或 111)作用时间,以及它在三相端电压上产生的 共同抬高或拉低的电压成分。
为什么要插入这个*东西*?
为了保持PWM波形的对称性并减少谐波含量,通常会在非零电压空间矢量之间插入零电压空间矢量。零矢量的插入方式有多种,如中心对称插入、两端对称插入等。不同的插入方式会对电机的性能产生不同的影响。同时也为了保证“一次只切换一个管子”,需要在两次变换之间插入零区分量。
下面还有两个等式说明了U1、U2、U4、U6之间的关系。需要注意的是这里的U1U2不是指中间上面的圆中不同方向的电压,而是U4U6方向参与$U_{out}$合成的电压。也就是说,$U_{out}$是由U4U6这两个方向上的电压合成的,而U4和U6到底有多少参与了合成的具体数值则由这两个等式计算。
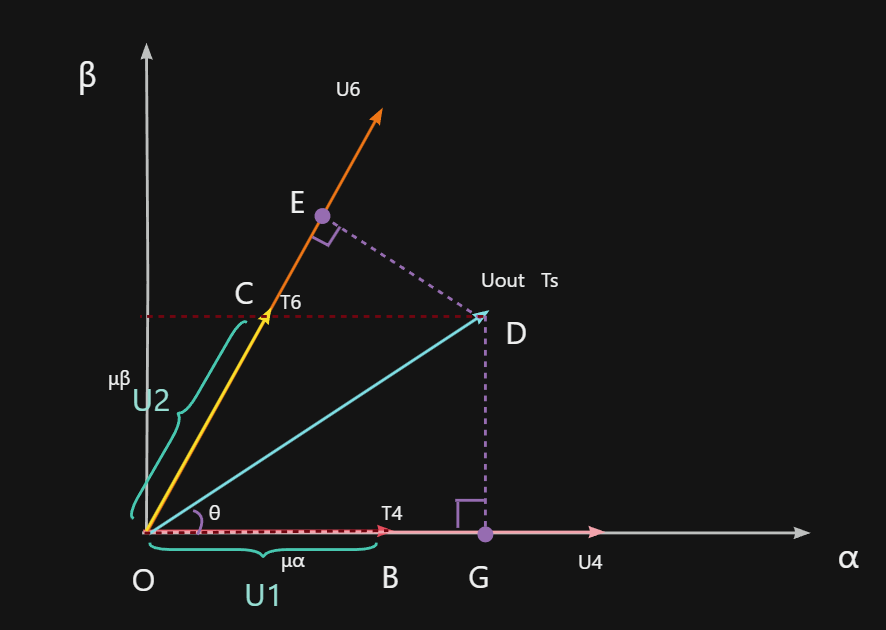
计算Uout最大值:过程
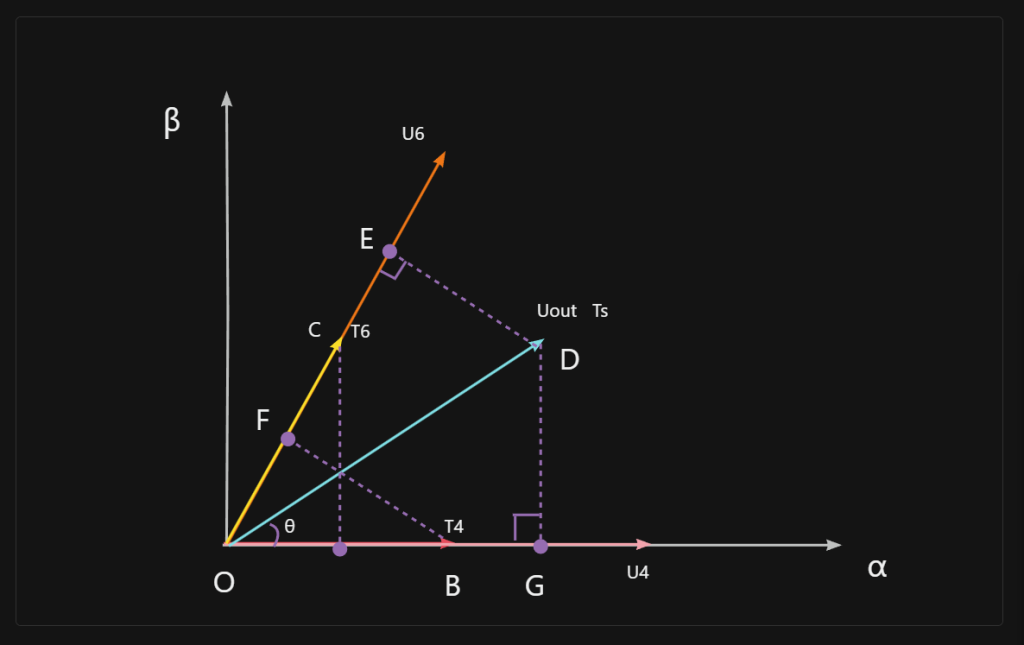
这是左上部分的图,并添加了点和辅助线方便描述计算过程。
首先我们有:$T_s = T_4+T_6+T_0$,也就是说$\frac{T_0+T_4+T_6}{T_s}=1$;
但是我们还不知道T0是多少,于是我们只能得到:$\frac{T_4+T_6}{T_s}<1$。
接下来我们来算算$T_{out}$的最大值:
作辅助线DE和BF,易得|DE|=|BF|;
又有:|DE| = $U_{out} · \sin (\frac{\pi}{3}-θ)$= |BF|;
所以:$T_4 · U_4$= $\frac{T_S·U_{out} · \sin (\frac{\pi}{3}-θ)}{\frac{\sqrt{3}}{2}}$,
同理,$T_6·U_6$= $\frac{T_S·U_{out} · \sinθ}{\frac{\sqrt{3}}{2}}$。
- 注:只要在这里稍稍移项便能得出$U_1$= $\frac{T_4}{T_s}U_4$。
将上面这两个式子中的U移到左边,并将两式相加(由于U6=U4,所以这里统一化为U4):
$T_4 + T_6$= $\frac{T_S·U_{out} · (\sinθ+\sin (\frac{\pi}{3}-θ))}{\frac{\sqrt{3}}{2}U_{4}}$
=$\frac{T_S·U_{out} · (\sin (\frac{\pi}{3}+θ))}{\frac{\sqrt{3}}{2}U_{4}}$
将$T_s$移到左边,得:
$\frac{T_4+T_6}{T_s}$= $\frac{U_{out} · (\sin (\frac{\pi}{3}+θ))}{\frac{\sqrt{3}}{2}U_{4}}$
而又有:$\frac{T_4+T_6}{T_s}<1$,且$\sin (\frac{\pi}{3}+θ)$⋲ [$\frac{\sqrt 3}{2}$, 1 ]
所以:$U_{out} \le \frac{\sqrt3}{2}U_{4}$
不难发现,$\frac{\sqrt3}{2}U_{4}$正好是正六边形的内切圆的半径,也就是说,SVPWM能稳定在各个方向上输出的最大值就是$\frac{\sqrt3}{2}U_{4}$。
平均值等效原理
上面的计算过程需要一个前提:U4和U6同时存在。
但是现实里受到硬件限制我们没法做到这一点。因此我们就需要用到平均值等效原理(图中间下方部分)。
简单来说就是将整个过程拆分成一个个小过程,每个小过程中只存在U4或者U6,最终合成为输出值。
七段式和五段式SVPWM
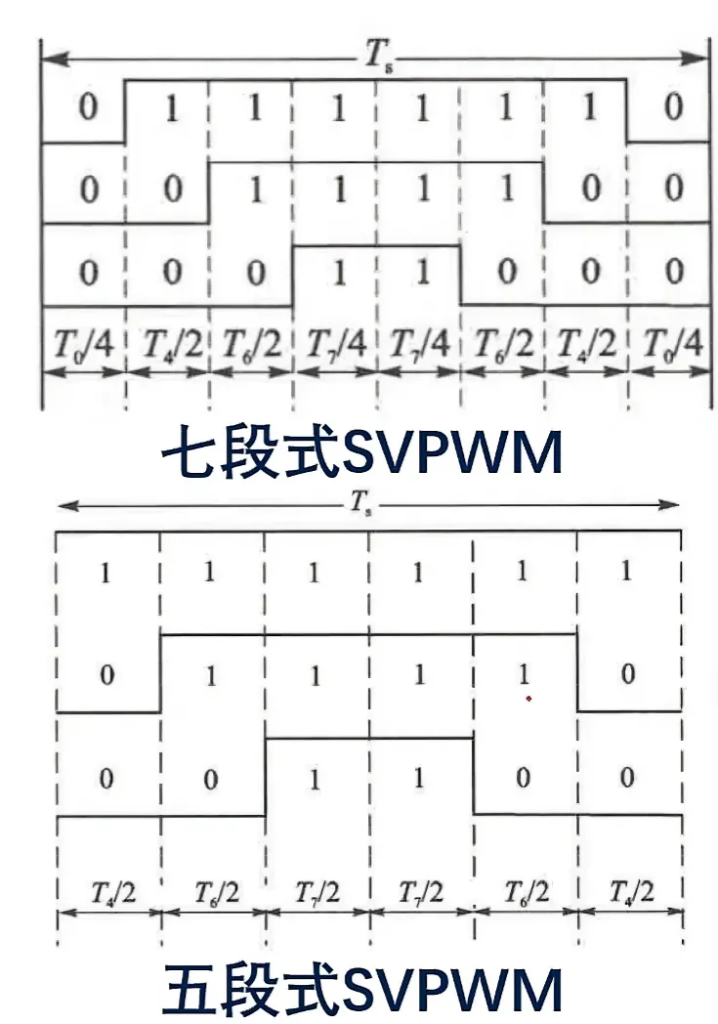
七段式和五段式主要差别在于零区分量的插入不同。
同时,从图中我们可以看到七段式mos管一共开关了6次(竖线),而五段式仅仅开关了4次。从开关损耗和截止损耗来看五段式更优。
但是减少/改变零区分量会导致五段式电流谐波比七段式多,因此两者各有优劣。
在实际中七段式用的最普遍,下文所说的都是以七段式为主。
电压矢量增量角
什么是电压矢量增量角
某一时刻,我们的$U_{out}$处在一个θ的角度下;经过$T_S$时刻后,$U_{out}$改变了它的角度。
那么这两个角度之差就是我们的增量角。
什么是“将电压旋转平面等切割成R个小增量”?
先看左边下方的说明,电压向量旋转一圈所需时间为T,我们两次PWM调制之间的间隔时间为Ts;所以在电压向量旋转一周的时间内,我们一共可以进行R=T/Ts次控制,也就是说我们可以把一个完整的圆等分成R个小扇形,每个小扇形角度为$g=\frac{2\pi}{R}=\frac{2\pi T_s}{T}$。g越小我们的控制就会越平滑,越大就越有段落感。
同时由于整个圆由六个基本电压分成6块大扇形,我们至少要保证g<60°才能使电机正常旋转。
七段式SVPWM控制流程:
- 确定当前电角度所在扇区
- 确定T4、T6(或其它扇区对应时间)大小
- 根据T4T6来计算CCR切换时间点
- 依照计算结果控制。
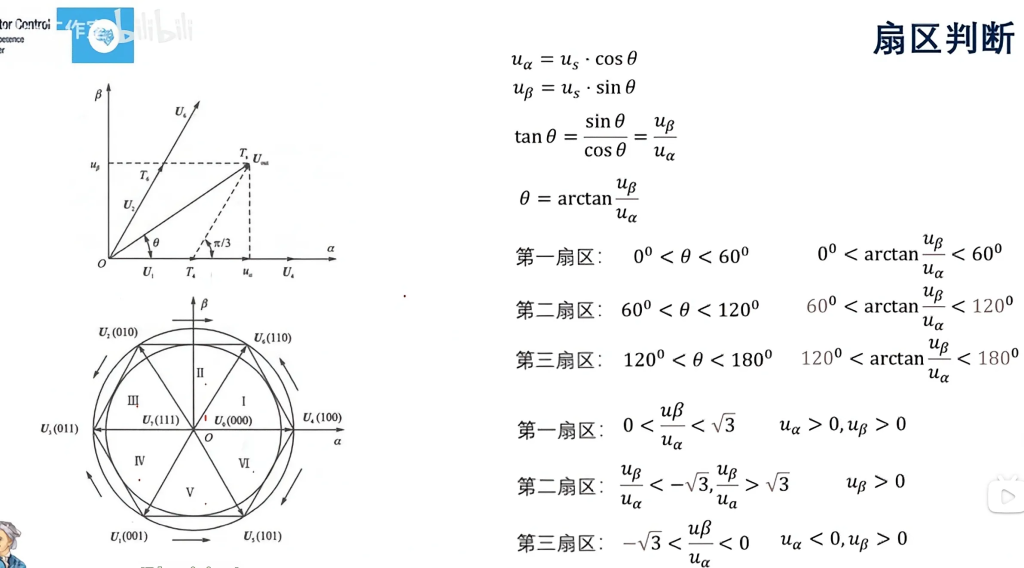
扇区判断
T4、T6计算
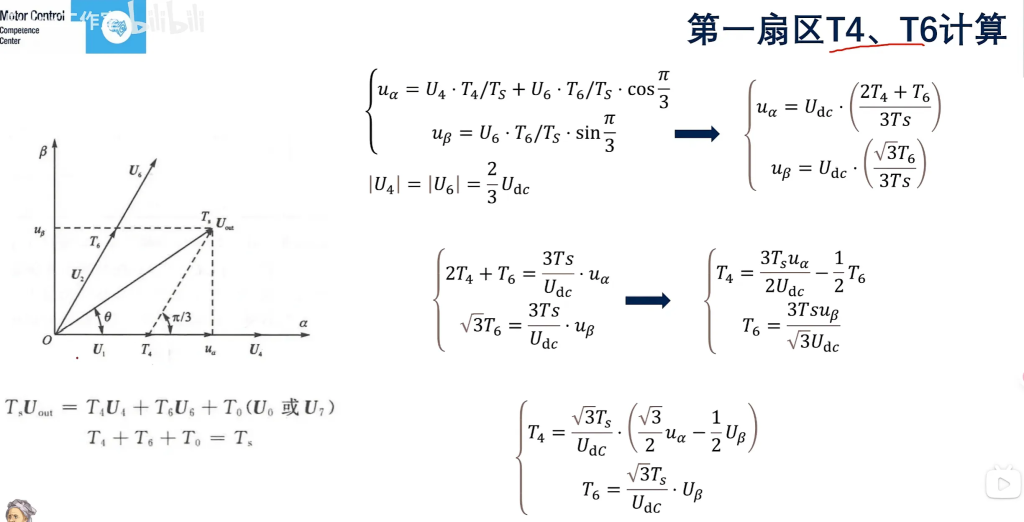
首先我们已知:$T_s · U_{out}=T_4U_4+T_6U_6+T_0U0(或U_7,下文同)$
移相得:$|U_{out}|=\frac{T_4}{T_s}|U_4|+\frac{T_6}{T_s}|U_6|+\frac{T_0}{T_s}|U0|$
而且易得:$\frac{T_4}{T_s}|U_4|=|U_1|$,$\frac{T_6}{T_s}|U_6|=|U_2|$
我们又是知道∠COB=60°,所以有:
$$\begin{cases}\mu\alpha=U_1+U_2·\cos\frac{\pi}{3} \\mu\beta=U_2·\sin\frac{\pi}{3} \ \end{cases}$$
又因为:$|U_4|=|U_6|=\frac{2}{3}|U_dc|$,
为什么$|U_4|=|U_6|=\frac{2}{3}|U_dc|$?
这是由于电路内部结构决定每一项的相电压最大只能达到$\frac{2}{3}U_dc$,$U_4、U_6$虽然是合成矢量,但由于两相间夹角120°,刚好使合成后数值不变。
所以:
$$\begin{cases} u_\alpha = U_{\text{dc}} \cdot \\ (\frac{2 T_4 + T_6}{3 T_s}) \ u_\beta = U_{\text{dc}} \cdot (\frac{\sqrt{3} T_6}{3 T_s}) \end{cases}$$
再经过一系列移相、通分:
$$\begin{cases} T_4 = \frac{\sqrt{3} T_s}{U_{dc}}\\ \cdot (\frac{\sqrt{3}}{2} u_\alpha – \frac{1}{2} U_\beta) \ T_6 = \frac{\sqrt{3} T_s}{U_{dc}} \cdot U_\beta \end{cases}$$
总结
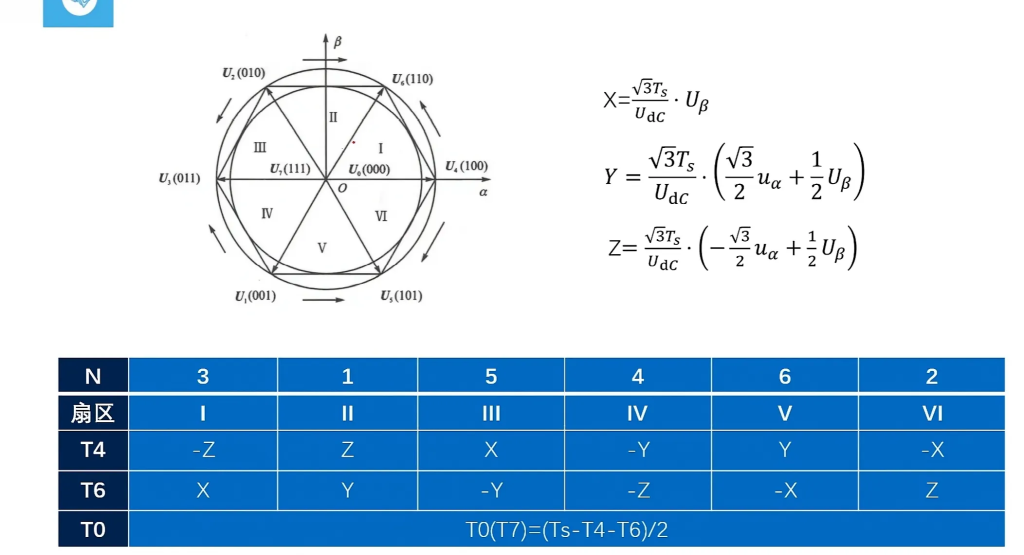
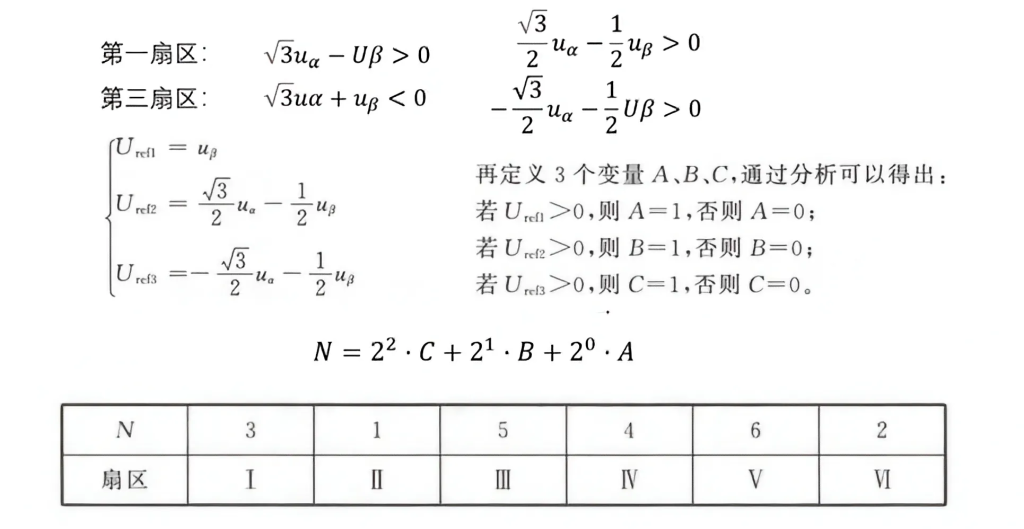
| N | 3 | 1 | 5 | 4 | 6 | 2 |
| 扇区 | Ⅰ | Ⅱ | Ⅲ | Ⅳ | Ⅴ | Ⅵ |
| T4 | -Z | Z | X | -X | -Y | Y |
| T6 | X | Y | -Y | Z | -Z | -X |
| T0=T7=(Ts-T4-T6)/2 | ||||||
什么是T4、T6?
看见圆外面的箭头了吗?每个箭头从“U4”出发,指向“U6”。比如在第二扇区里,“U4”为U2,“U6”为U6 。
另外注意括号里的部分,并与判断扇区时用到的$U_{ref2}、U_{ref3}$比较,可以发现两者相等。因此可以减小一些计算量。
实际写代码时不用分的太清这两者的区别,因为下文计算切换时刻时还有一个判断;在这一步我们只要把XYZ计算好并按表格赋值给T4T6就行了。
mos管切换时刻(Ⅰ、Ⅱ区为例)
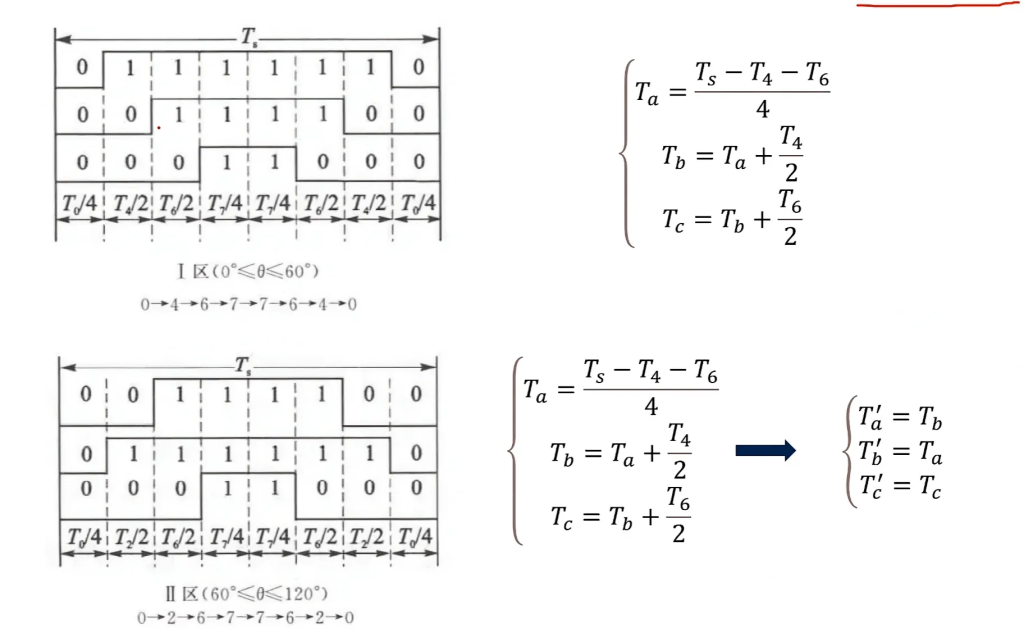
切换时刻,是指在一段完整的七段式周期中应该在何时开关对应的mos管。
三条折线从上到下分别对应a、b、c三相,因此我们把切换对应相的时刻称为Ta、Tb、Tc。
又因为周期是对称的,因此我们只要让定时器采取中心对齐计数,便可以免去计算两次的麻烦。
第Ⅰ扇区右边的计算不难看懂;但是第Ⅱ扇区右边因为排版原因有些难以理解:
左边括号里的TaTbTc对应的是第Ⅰ扇区计算出来的值,$T_a^\prime T_b^\prime T_c^\prime$才是第Ⅱ扇区的值。
看到这你应该也能看出来,在一个周期内,一共有6个切换时间点,而他们两两对称,所以我们关心的只有三个时间点;这三个时间点的值是“固定”的,不同扇区只是每个时间点对应切换的MOS管不同而已。
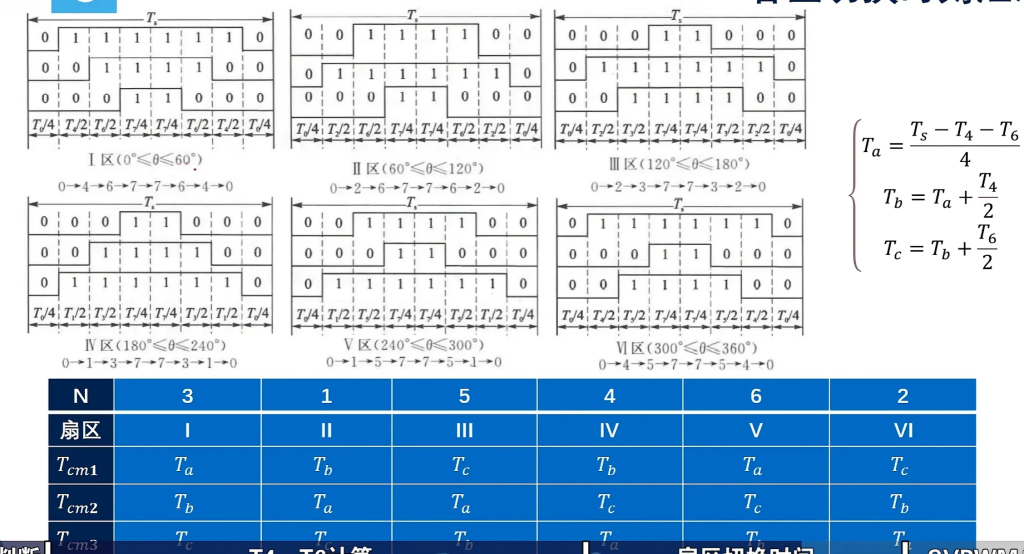
这是怎么编排的?
一个七段式周期可分为8个部分,我们看前四个部分。不难发现不论在哪个扇区,第一部分永远是3个0,第二部分是3个0一个1,第三部分是2个0一个1,第四部分是3个1 。通过以含有1的个数对各相排序,可以保证一次只切换一个mos管。
采样问题
我们希望在周期中心时刻对电路进行电流采样,而想要采样有必须在电路下桥打开时才能进行。可是当我们处于周期中间时,所有路全是“1”,也就是上桥打开。这怎么办呢?
我们只要稍稍改变各路切换顺序,比如让1多的先出现。以Ⅰ区为例,原先的切换顺序是04677640,但我们改编成76400467,就可以保证周期中间时对下桥采样了。而且这么做我们也不需要重新计算切换时间,只需要将计时器计数方式从“/\”改为“\/”就行了,实际上就是改变了三角波的相位。(后记:视频演示里是改变了切换顺序的,但原理相同。)
仿真
代码接收Uα、Uβ、Udc和Ts的值,输出3路切换时间点和当前扇区。
文中的T1T2即为T4T6,Tpwm为Ts。
single(0)表示单精度0,即C里的float类型。
function [Tcmp1,Tcmp2,Tcmp3,sector] = fcn(Valpha,Vbeta,Udc,Tpwm)
%#codegen
sector = single(0);
Tcmp1 = single(0);
Tcmp2 = single(0);
Tcmp3 = single(0);
%========Parameters statement================
Vref1 = Vbeta;
Vref2 = (sqrt(3)*Valpha - Vbeta)/2;
Vref3 = (-sqrt(3)*Valpha - Vbeta)/2;
%========Sector calculation=================
if (Vref1>0)
sector = single(1);
end
if (Vref2>0)
sector = sector+single(2);
end
if (Vref3>0)
sector = sector+single(4);
end
%======== X Y Z calculation===================
X = sqrt(3)*Vbeta*Tpwm/Udc;
Y = Tpwm/Udc*(3/2*Valpha+sqrt(3)/2*Vbeta);
Z = Tpwm/Udc*(-3/2*Valpha+sqrt(3)/2*Vbeta);
%==========Duty ratio calculation================
switch (sector)
case 1
T1 = Z; T2 = Y;
case 2
T1 = Y; T2 = -X;
case 3
T1 = -Z; T2 = X;
case 4
T1 = -X; T2 = Z;
case 5
T1 = X; T2 = -Y;
otherwise
T1 = -Y; T2 = -Z;
end
if T1+T2 > Tpwm
T1 = T1/(T1+T2);
T2 = T2/(T1+T2);
end
ta = (Tpwm-(T1+T2))/4.0;
tb = ta+T1/2;
tc = tb+T2/2;
%==========Duty ratio calculation================
switch (sector)
case 1
Tcmp1=tb;
Tcmp2=ta;
Tcmp3=tc;
case 2
Tcmp1=ta;
Tcmp2=tc;
Tcmp3=tb;
case 3
Tcmp1=ta;
Tcmp2=tb;
Tcmp3=tc;
case 4
Tcmp1=tc;
Tcmp2=tb;
Tcmp3=ta;
case 5
Tcmp1=tc;
Tcmp2=ta;
Tcmp3=tb;
case 6
Tcmp1=tb;
Tcmp2=tc;
Tcmp3=ta;
end
end
发表回复